HardCode
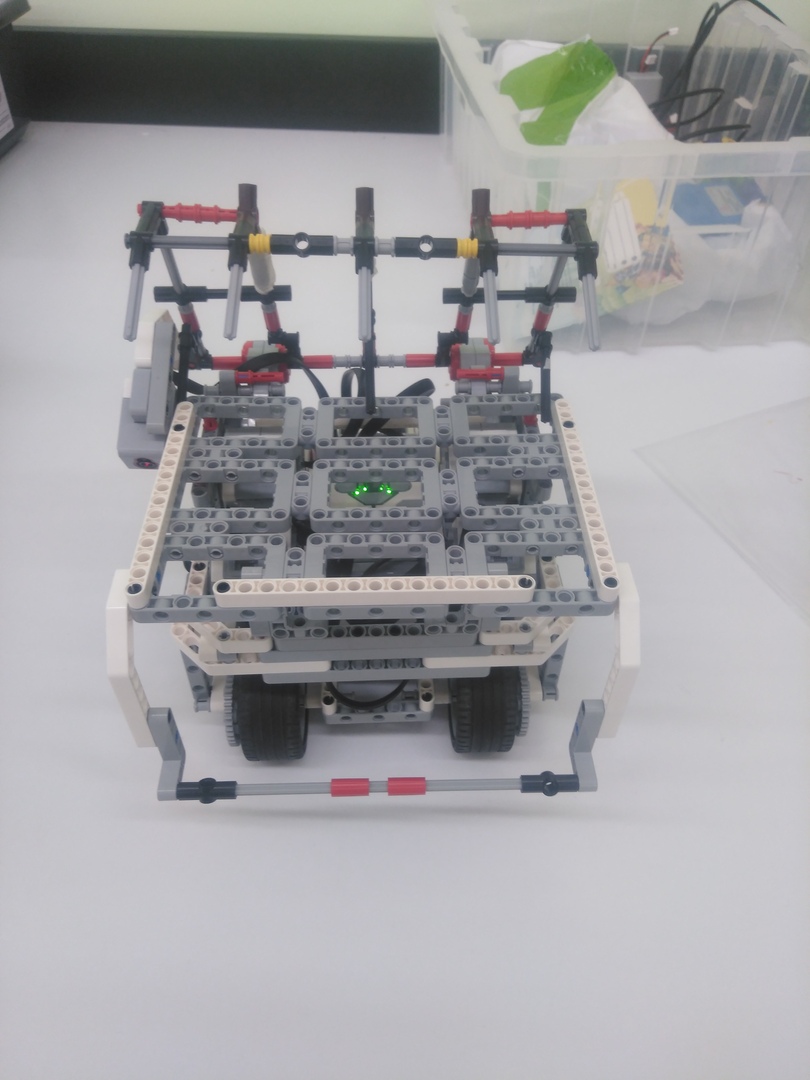
ROB-24591Робот собран на базе Lego, конструкция похожа на робота которого мы использовали на Robofinist Пермь и заняли 1 место. Размеры робота не превышают 23х23х23 см что позволяет без проблем заезжать в арку. На роботе стоит шестерёночное отношение, которое увеличивает мощность крутящего момента в 2 раза. Следование по линии выполняется 2 датчиками цвета lego mindstorms. Ездит по линии с помощью PD регулятора, что создаст плавное движение по линии и оптимальную троектоию движения робота. При критической ситуации, то есть когда датчик (первый или второй) находится в точке минимального отражения цвета, то есть самый цент линии, включается часть программы в которой он проезжает вперёд и поворачивается в сторону линии, данная функция не дам робото съехать с линии и поможет центрироваться по ней. В настоящее время робот сбивает препятствие, но в будущем робот будет объезжать препятствия с помощью ультразвукового датчика, который будет ровно спереди робота, то есть в месте столкновения робота и препятствия. Чтобы не терять линию на горке и на препятствиях было принято решении сделать «лыжи» которые стабилизируют датчики, для оптимальных считываемых значений. Лыжи состоят из 4 подвижных балок, которые позволят лыжам производить дугообразные движения верх и вниз. При сборе жертв используется вилообразный ковш, который буквально подхватывает жертв. Поиск жертв осуществляется полным обходом зоны роботом, по траектории змейки. Робот находит зону с помощью считывания сопротивления двигателя, такой способ очень удобен, поскольку не требует подключения дополнительных датчиков. Выгрузка осуществляется механизмом не требующий дополнительного двигателя, а только точку опоры. Выгрузка осуществляется нажатием на рычаг, который нажимается при соприкосновении задней части робота и жёсткой точки опоры.
Файлы
Добавлен 10.12.2024
Дополнительные файлы
{kind=link}
Добавлен 10.12.2024
{kind=link}
Добавлен 10.12.2024
{kind=link}
Добавлен 10.12.2024