Новые горизонты
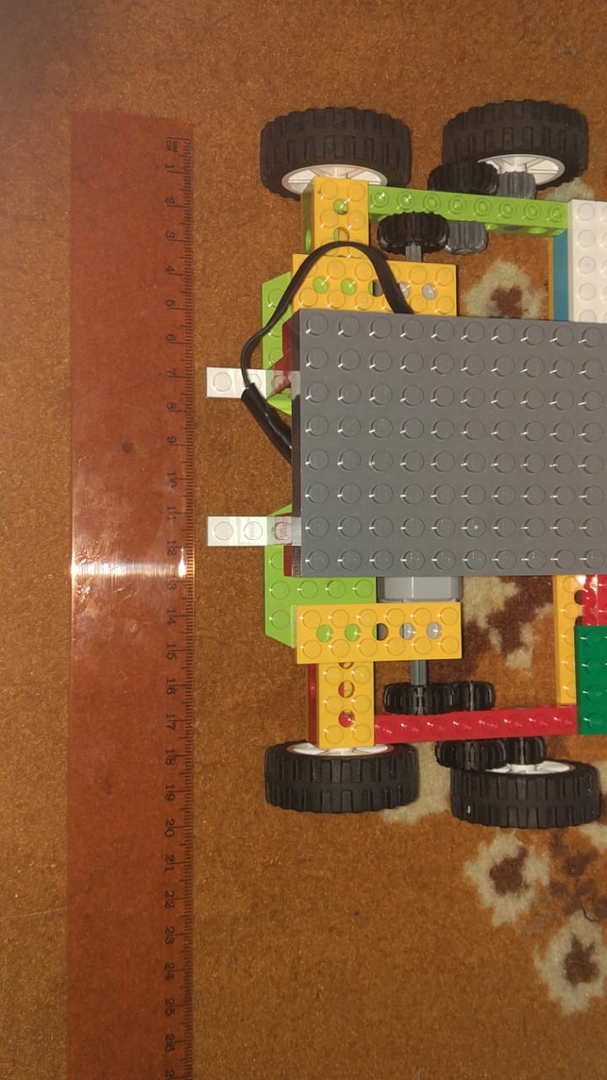
ROB-34672Полноприводный робот с манипулятором для перемещения предметов.
В конструкции использованы зубчатые передачи.
Шасси на двух моторах позволяет подъезжать к объектам, затем манипулятор захватывает объекты и перемещает их в нужные зоны.
Джойстик для управления шасси реализован с пощью датчика наклона.
В конструкции использованы три смартхаба и три мотора.
Вся электроника соответствует требованиям, взята из конструкторов Lego wedo 2.0
Для управления роботом написано несколько программ - отдельно для манипулятора и отдельно для шасси.
управление роботом предполагает двух операторов, один управляет шасси, другой - манипулятором.
Дополнительные файлы
{kind=link}
Добавлен 10.12.2024
{kind=link}
Добавлен 10.12.2024