Робочерни
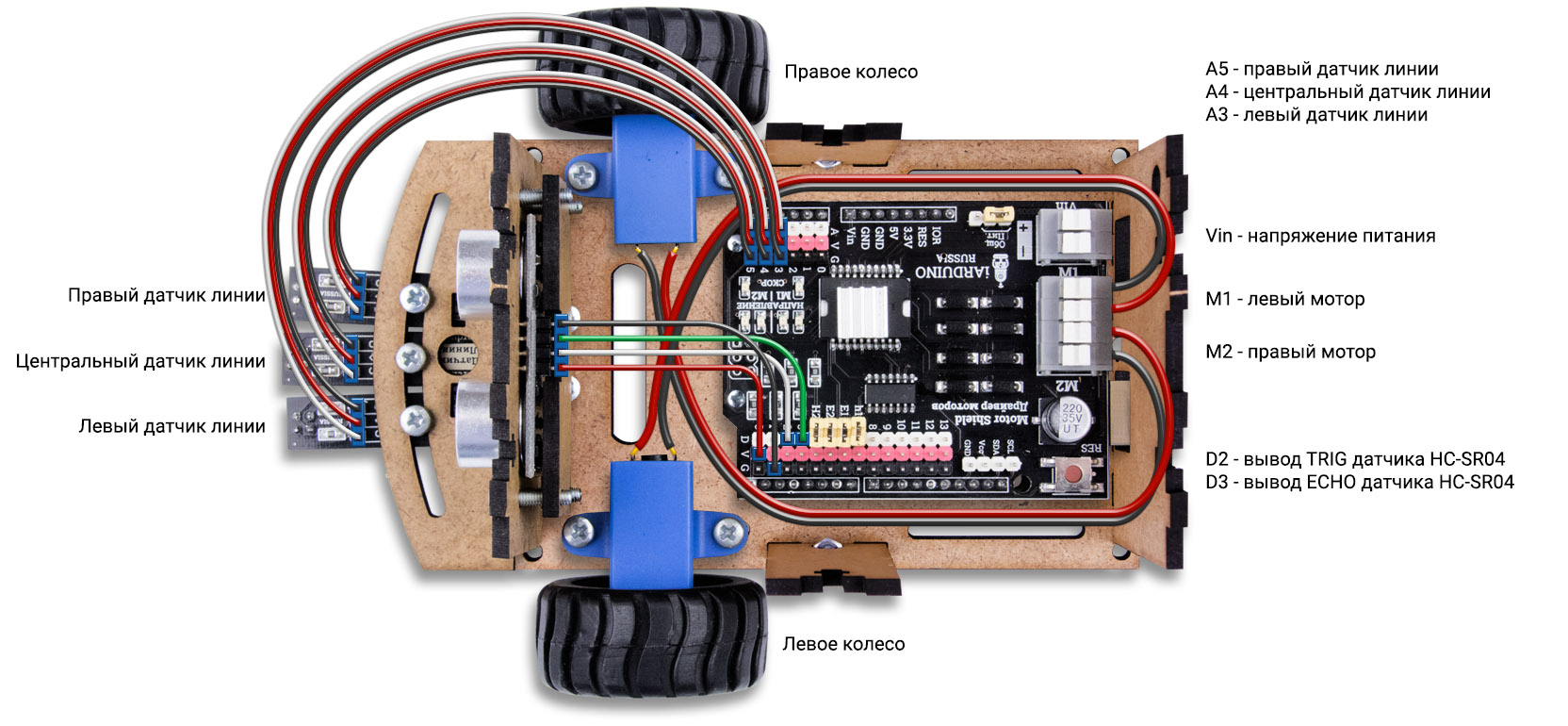
ROB-38077Робот сделать на основе микрокон роллера arduino. Основание робота напечатано на 3d принтере. Так что роботе имеется линейка датчиков pololu. Кроме этого есть драйвер двигателя l293. Шины робота вылиты из силикона. Есть ещё 2 дополнительных датчика. Моторы 10:1. Основание диском напечатано на 3 d принтере. Питание подаётся от литиополимерного акамулятора. Моторчики подключаются к клеммам M1 (левый мотор) и M2 (правый мотор) расположенным на Motor Sield. Аналоговые датчики линии подключаются к любым аналоговым входам Arduino Uno, в нашем примере используются входы A5 (для правого датчика), A4 (для центрального датчика) и A3 (для левого датчика). Вывод TRIG ультразвукового датчика расстояния подключается к любому выводу Arduino Uno, в нашем случае вывод D2. Вывод ECHO, при использовании библиотеки iarduino_HC_SR04_int, может подключаться только к тем выводам Arduino Uno, которые используют внешние прерывания, в нашем случае это вывод D3. Все датчики запитаны от напряжения 5 В. Напряжение питания на Arduino Unoподаётся через Motor Shield (клеммник Vin), для чего нужно установить перемычку, рядом с клеммником, в позицию «Общ. Пит.». Входы Motor Shield H1 (направление 1 мотора), E1 (ШИМ 1 мотора), E2 (ШИМ 2 мотора), H2 (направление 2 мотора), по умолчанию, подключены к выводам D7, D6, D5 и D4 соответственно, но их можно поменять, сняв перемычку и соединив вывод Motor Shield с нужным выводом Arduino Uno.
Алгоритм работы:
- Если центральный датчик находится на линии, а боковые вне линии, то машинка едет прямо.