Blue Ice
ROB-44710Задача: Проехать три круга, объезжая красные и зеленые кубики.
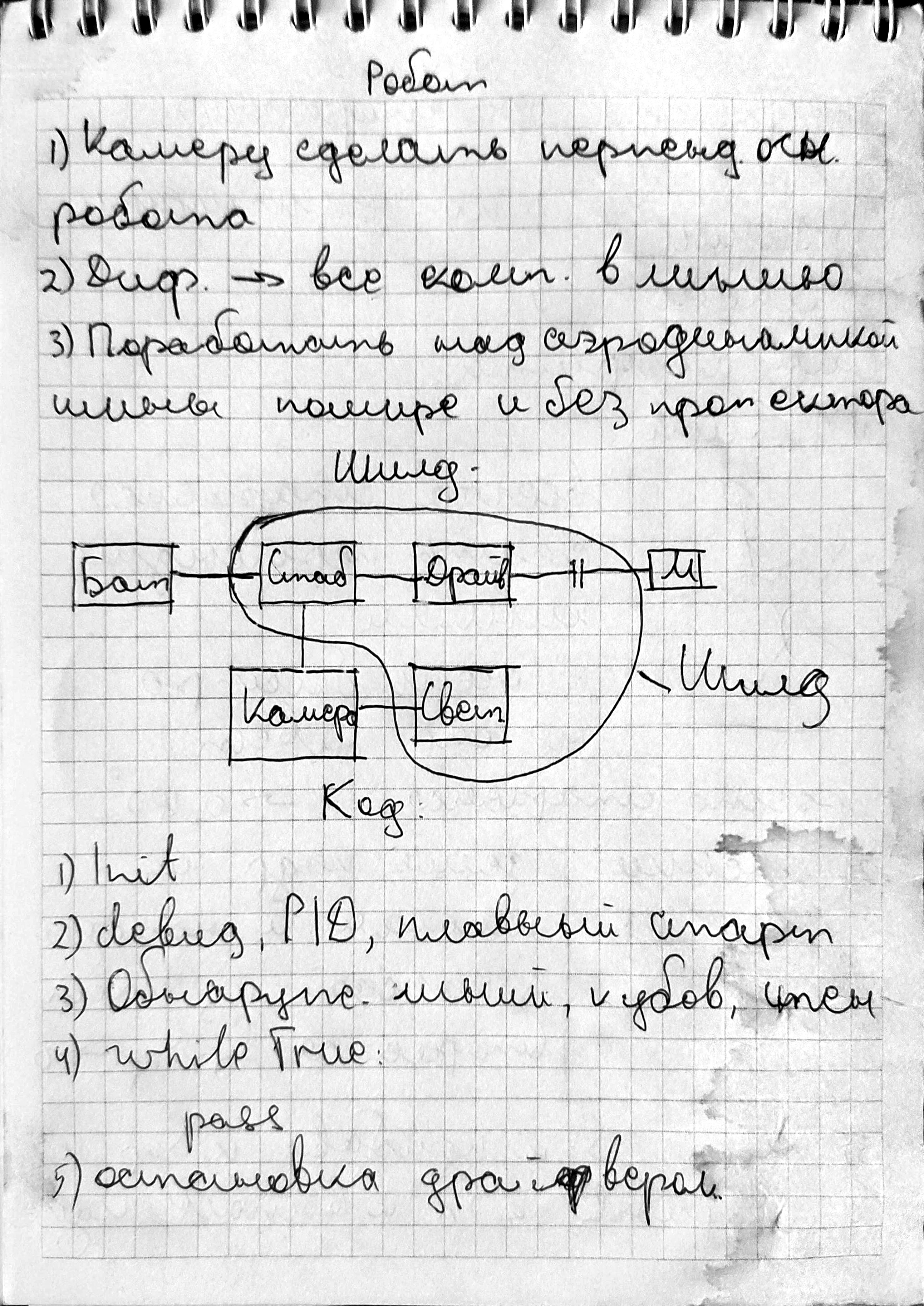
Робот: Основной контроллер камеры – OpenMV H7 Plus. Также выполнен шилд расширения для данной платы на микросхеме drv8833 для управления мотором задней оси.
Конструкция: Управление роботом также, как и в настоящей машине: один мотор, передняя ось с соблюдением угла аккермана.
Реализация конструкции: Все детали напечатаны на 3d-принтере пластиком PLA. Данный пластик идеально подходит для поставленной ранее задачи, так как обладает хорошей прочностью.
Программная часть: Камера программируется на MicroPython в среде от производителя OpenMV IDE.
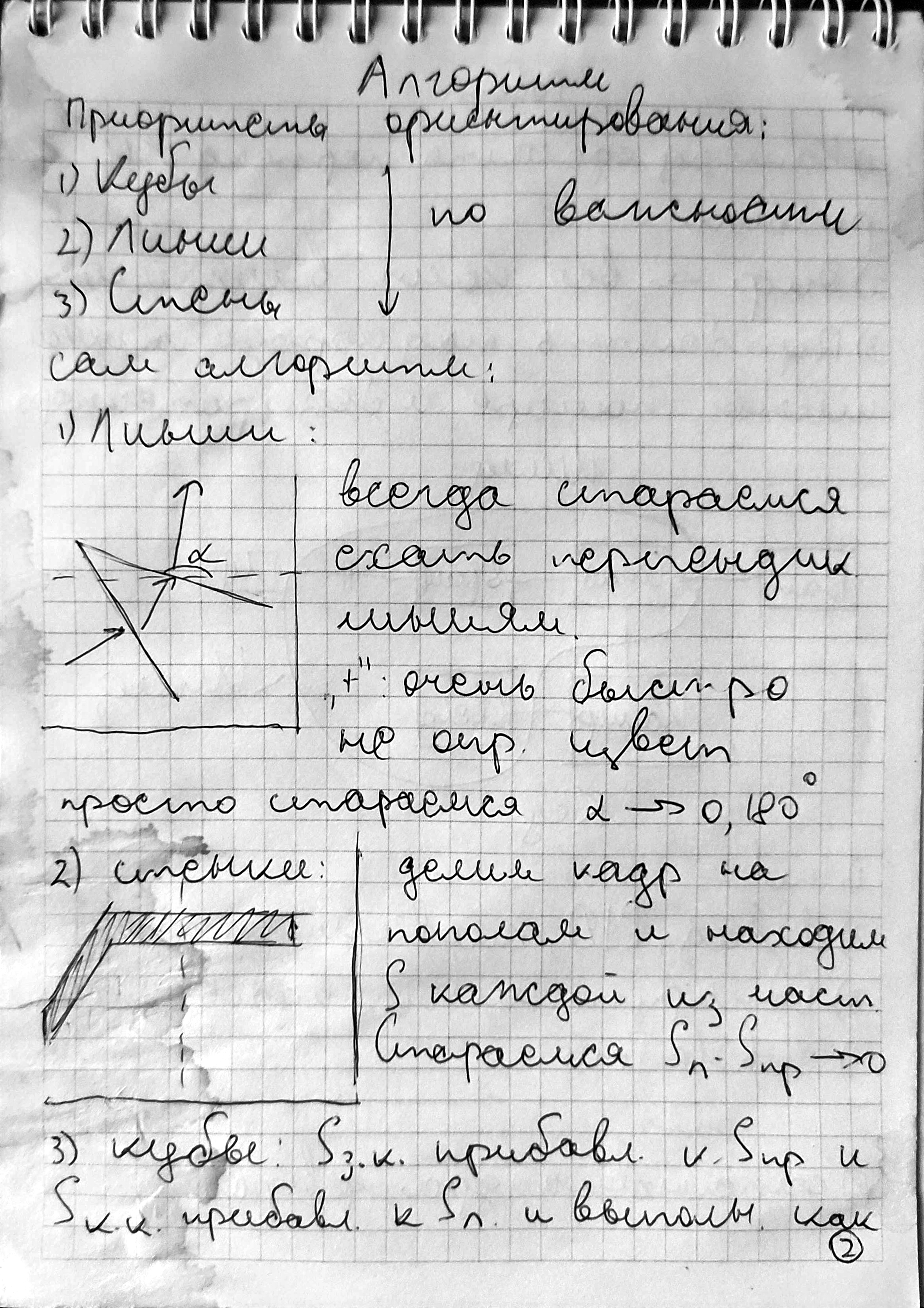
Алгоритм: Кадр делится на две части и анализируется на кол-во черного в кадре (наличие стен), красного и зеленого (кубики), оранжевый и синий (линий для поворота). Где в кадре кол-во условных единиц данного цвета больше от туда и поворачиваем. Также и наоборот: где цвета меньше туда поворачиваем.
Дальше представлены материалы, использованные в процессе создания робота:
- Идея алгоритма и конструкции (дополнительные файлы)
- Реализация алгоритма в IDE. Конструкции в Компас 3D
- Видео тестовых заездов тренировочного робота, на котором тестировались программы
Файлы
Добавлен 10.12.2024
{kind=link}
{kind=link}