Автоматизация процесса выдачи блюд в школьной столовой
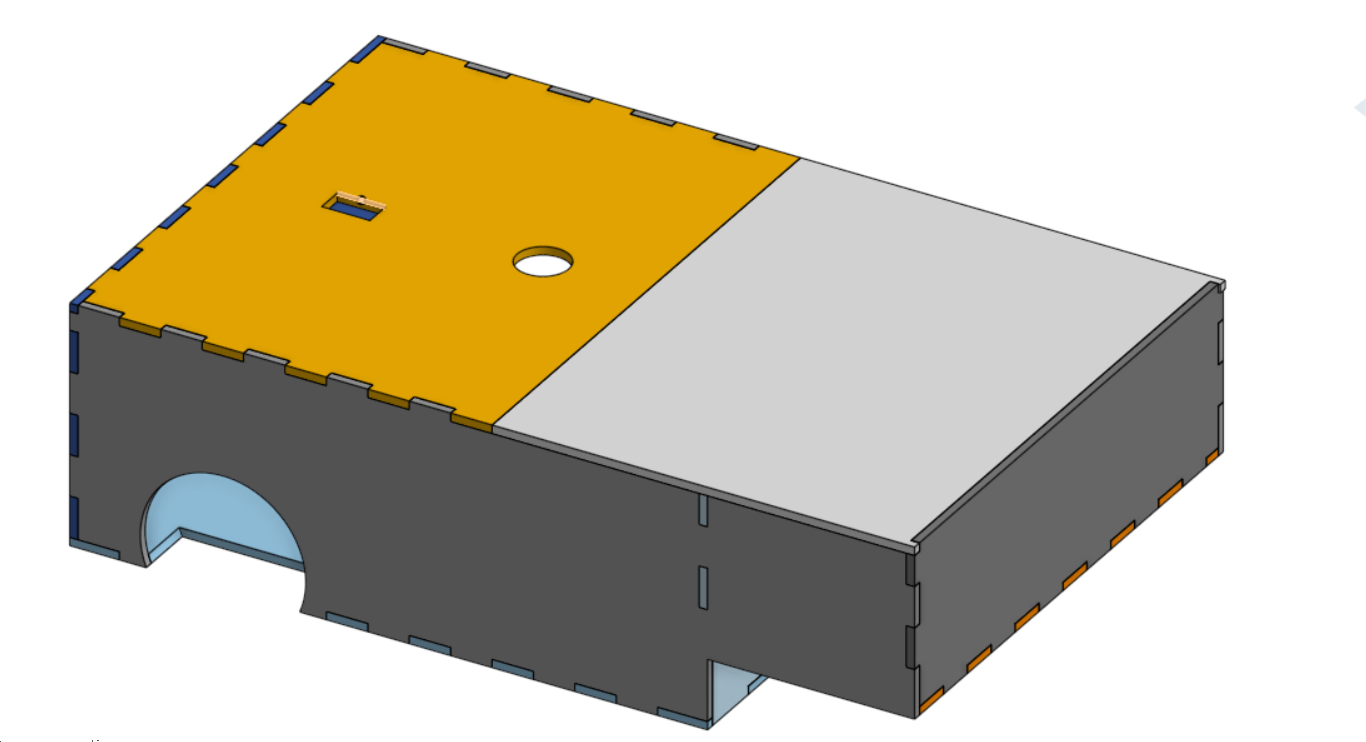
ROB-53808Робот, который получает еду и накрывает её на стол в автоматическом режиме. Особенность проекта заключается в низкой стоимости. Для изготовления корпуса использовались недорогие материалы: фанера, алюминий и отдельные пластиковые детали, напечатаные на 3D-принтере. В качестве навигационного устройства использовался бюджетный смартфон (около 10 тыс. руб.).
Система управления - инерциальная. Применяются данные акселерометра и гироскопа, которые были встроены в смартфон производителем. Для коррекции дрейфа используются визуальные данные, получаемые с камеры в рельном времени.
Для передвижения робота разработана платформа из фанеры. Модель корпуса была сделана в Onshape и вырезана на станке лазерной резки.
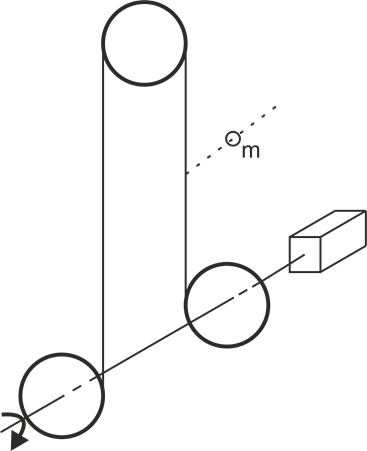
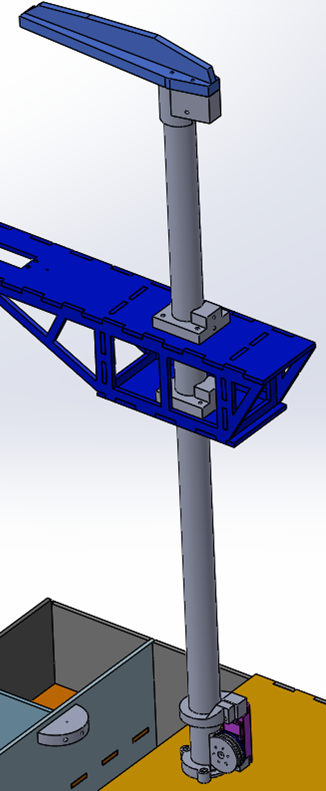
Поскольку в столовой есть столы разной высоты, в SolidWorks была разработана система, которая может поднимать или опускать верхнюю платформу (с тарелкой). Эта система включает в себя сервопривод, две катушки и трос. Для экономии пластика катушки были объединены в одну деталь.
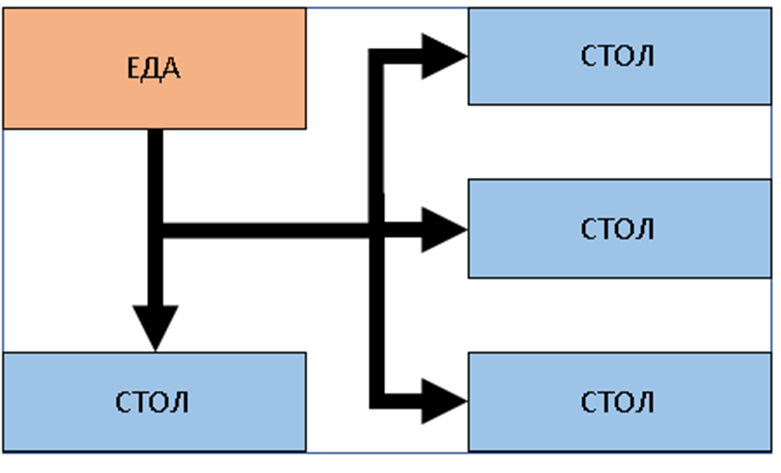
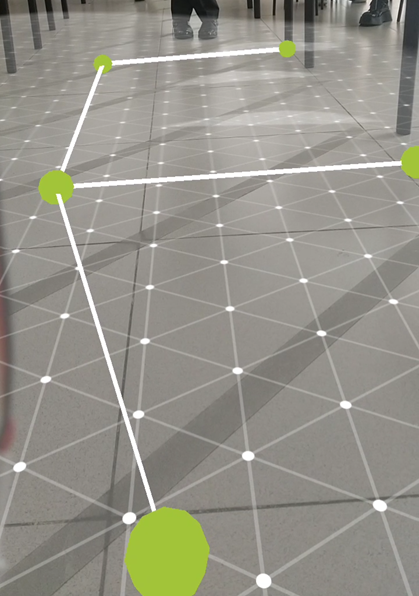
Для начала работы оператор должен установить позиции столов и задать граф - т.е., по каким путям может двигаться робот.
Алгоритм работы робота:
- Робот строит кратчайший маршут до стола выдачи блюд и следует по маршуту;
- Робот доезжает до стола выдачи;
- Робот поднимает верхнюю платформу на опредёленную высоту;
- Клешня открывается;
- Человек подносит тарелку к клешне;
- Клешня закрывается;
- Робот строит маршут и доезжает до ближайшего стола, на который он не ставил блюда;
- Робот опускается на уровень стола и открывает клешню, ставя тарелку на стол;
- Робот переходит к п. 1 до тех пор, пока он не накроет на все столы.
Файлы
Добавлен 22.11.2024
Добавлен 22.11.2024
Добавлен 22.11.2024
Добавлен 22.11.2024