Robot^3
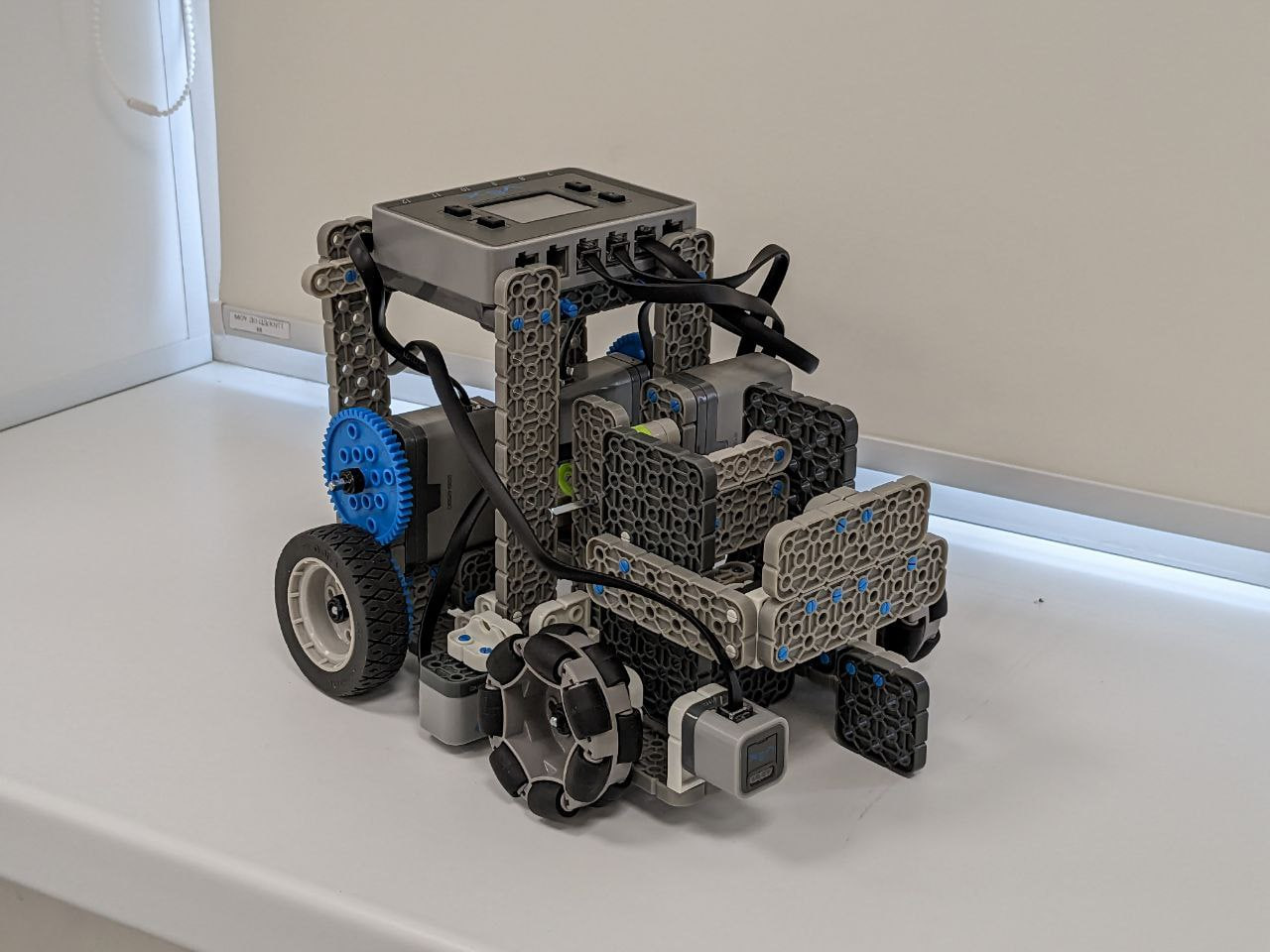
ROB-58376Робот использует контроллер VEX gen2, 2 сервопривода для движения, 1 сервопривод для толкания мячика, 2 датчика расстояния (1 - обнаружение соперника, второй для ориентации на поле), также 2 оптических датчика для того, чтобы ориентироваться на линии. Алгоритм работы простой - пока робот находится на линии ищем цель, останавливаемся, проверяем направление движения, обгоняем проекцию робота так, чтобы толкнуть мячик с упреждением. Если же робот подъехал к концу линии, то меняем направление движения. Если начал съезжать с линии, то корректируем движение так, чтобы вернуть нужное положение относительно линии.
Дополнительные файлы
photo_2023-05-25_10-50-42.jpg
(136.01 КБ)
{kind=link}
Добавлен 10.12.2024