VicMan
ROB-59581Цель:
Сконструировать управляемого робота для игры в робо-футбол.
Полигон представляет собой уменьшенную копию настоящего футбольного поля.
Одновременно на нем соревнуются 8 роботов, которые управляются таким же количеством участников.
Задача каждой команды – забить наибольшее количество голов в ворота соперника.
Робот полностью соответствует регламенту соревнований и требованиям прямого отбора.
Результат:
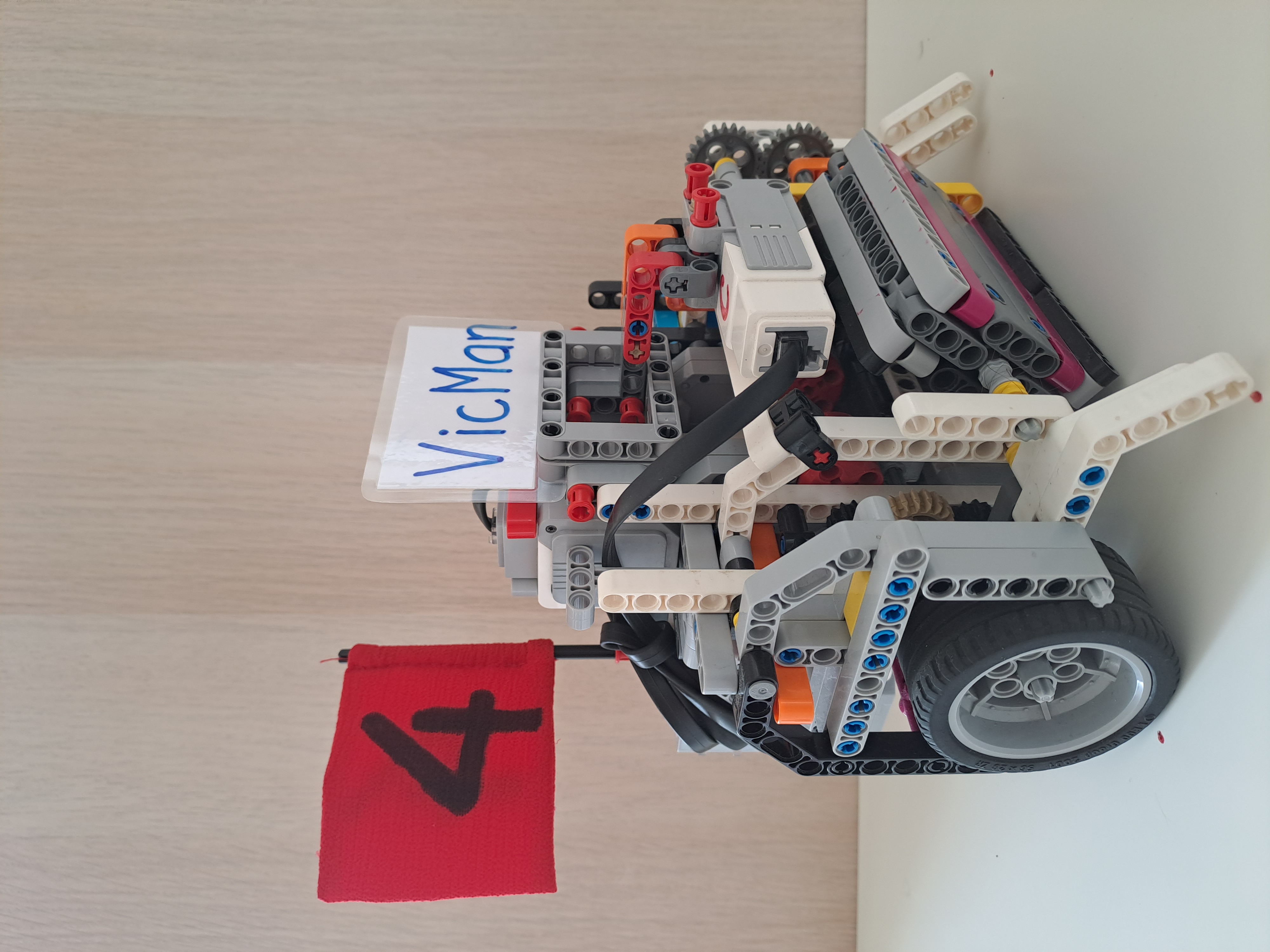
Робот команды «ЗЮЗЯ» с условным названием "VicMan" .
Максимальные габариты робота НЕ превышают
максимально допустимых габаритов по регламенту соревнований.
Робот свободно помещается в цилиндре со следующими характеристиками:
● диаметр:22 см;
● высота: 22 см.
Робот способен выполнить внутри измерительной конструкции
удар ударным механизмом.
В процессе игры робот НЕ превышает размеры, полученные в ходе
измерений.
Масса робота около 1 кг (по правилам не более 5 кг).
Роботом управляет один оператор.
Управление производиться извне через беспроводной канал
связи.
На роботе установлен вертикальный флагшток в виде оси
для крепления флага с обозначением номера робота.
Провода уложены вместе и закреплены на корпусе робота так, чтобы
не мешать другим роботам в течение игры.
Робот сконструирован так, что в процессе игры может выполнять как функции полевого игрока, так и функции вратаря
Робот оснащен ударным механизмом, который приводится в движении при помощи среднего мотора EV3.
Робот с таким ударным механизмом способен перемещать мяч на расстояния более 1 метра, оставаясь при этом неподвижным.
Конструкция робота не предусматривает захвата мяча, описанного правилами.
Корпус робота сконструирован так, что исключает возможность самостоятельного наезда на мяч.
Робот сконструирован командой более чем из 300 деталей образовательных конструкторов LEGO MINDSTORMS Education EV3 (Базового 45544 и Ресурсного 45560).
В процессе движения робот НЕ превышает максимально допустимых стартовых габаритов.
В конструкции и арсенале робота отсутствуют какие-либо запрещённые правилами приспособления, способные нанести вред, сопернику или поверхности полигона.
Контакт робота с поверхностью полигона осуществляется исключительно вращающимися резиновыми колёсными опорами.
Робот в качестве преимущества оснащен механическим редуктором переключения мощности, установленным на каждый из двух ведущих больших мотора EV3, передающий нужную мощность на колёсные опоры.
Переключение мощности осуществляется средним мотором EV3.
Робот содержит в своём составе контроллер EV3, аккумуляторную батарею EV3, два больших мотора EV3 и двa средних мотора EV3.
Файлы
Добавлен 10.12.2024
Дополнительные файлы
{kind=link}
Добавлен 10.12.2024