Робот-мышь
ROB-60253Робот-мышь реагирует на сигналы робота-кота и начинает движение.
Мышь действует по следующему алгоритму:
- Ждёт сигнала.
- Начинает крутиться вокруг своей оси.
- В случайный момент прекращает вращение.
- Едет определенное время прямо после окончания вращения, пока робот-кот не перестанет его видеть.
- Когда заканчивается получение сигнала робот останавливается.
Конструкция предполагалась небольшой, чтобы мышь была удобной при эксплуатации потребителями.
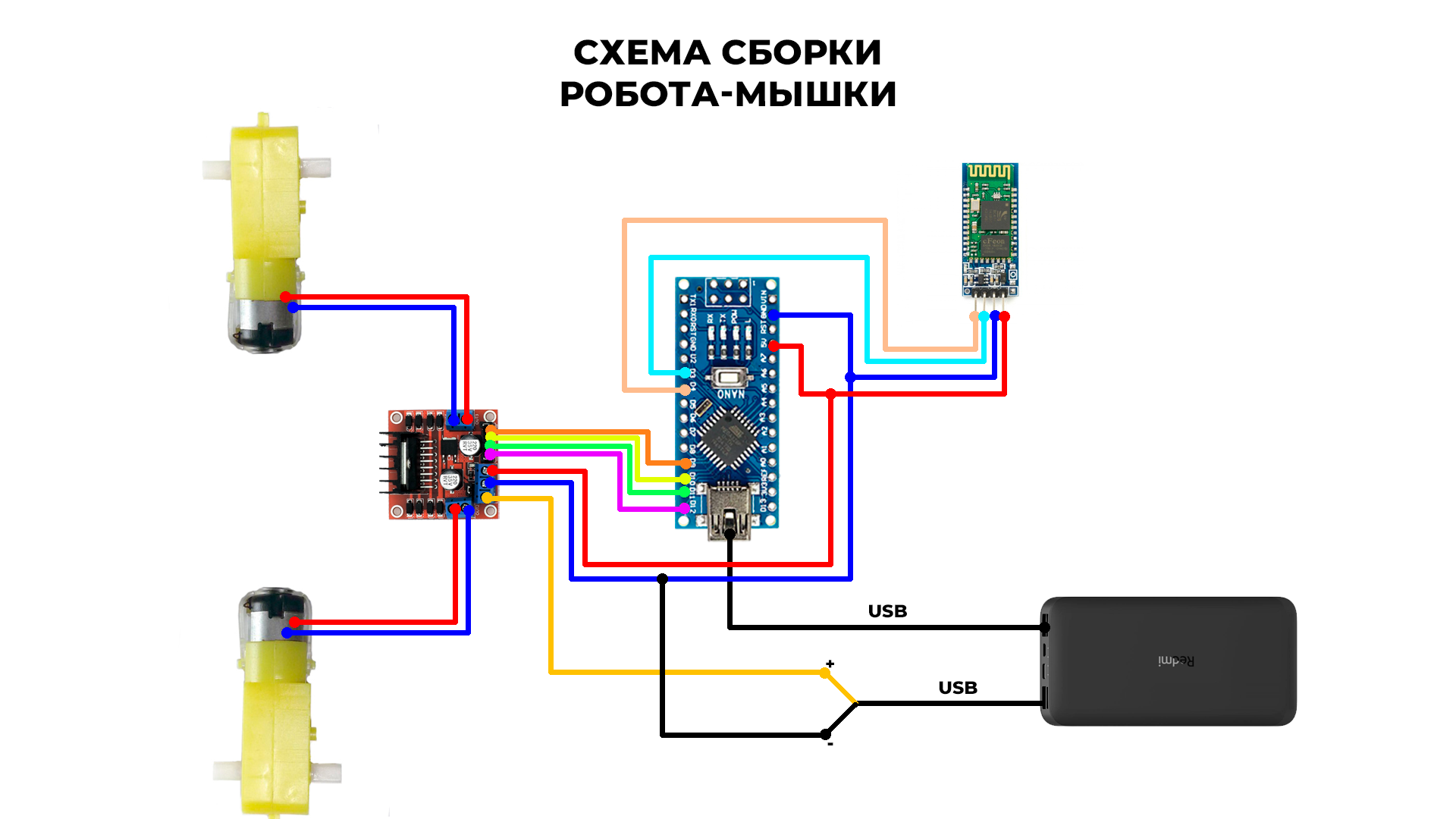
Робот-мышь использует Bluetooth модуль HC-06 и принимает сигналы с главного робота. Он идет в комплекте с главным роботом и используется как игрушка
Дополнительные файлы
mouse connection.png
(378.59 КБ)
{kind=link}
Добавлен 10.12.2024
doc_for_Rita.pdf
(889.58 КБ)
Добавлен 10.12.2024
mouse_photo.jpg
(125.04 КБ)
{kind=link}
Добавлен 10.12.2024