Система управления манипуляторами с обратной тактильной связью
ROB-60685Система управления манипуляторами с обратной тактильной связью призвана сделать управление манипуляторами интуитивным и понятным каждому, а также уменьшить вероятность столкновения манипулятора с посторонними объектами и деформации переносимого объекта, за счёт добавления осязания к управлению манипулятором (система даёт оператору возможность почувствовать то что “чувствует” манипулятор).
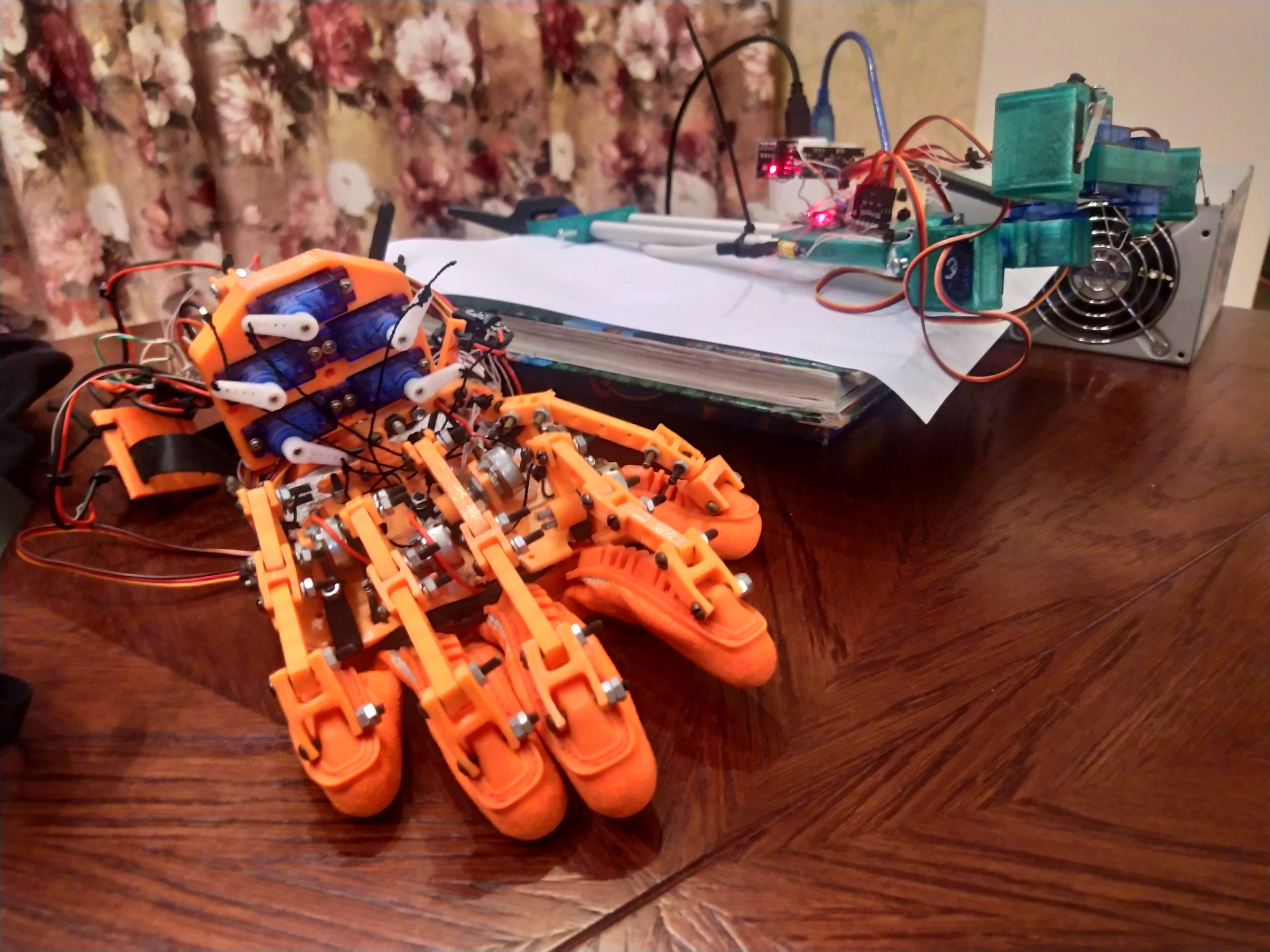
Система представляет из себя перчатку и рукав, которые считывают движение пальцев, кистевого локтевого и плечевого суставов. Демонстрационный манипулятор на данный момент включает в себя лишь кисть - клешню и кистевой сустав, однако остальные суставы находятся в разработке.
Arduino на перчатке считывает данные со всех потенциометров и отправляет их на Arduino на манипуляторе, и в то же время управляет сервоприводами отвечающими за обратную тактильную связь.Arduino на манипуляторе принимает сигнал и посылает его на сервоприводы, считывает сигналы с концевиков, если нажат хотя бы один ,отправляет сигнал на перчатку, которая в свою очередь блокирует определённый сервопривод, тем самым создавая сопротивление пальцу оператора.
Наша система также призвана помочь при проведении опасных исследований, например, в качестве манипулятора за болтом батискафа, с помощью которого учёные буквально смогут “потрогать” океаническое дно. Также наша система поможет при проведении “удалённых операций”, например, если человеку срочно требуется операция, а хирурга, который смог бы её провести, нет в соседних городах, квалифицированный хирург сможет принять непосредственное участие в проведении операции с помощью нашей системы и медицинского манипулятора. Также она может быть применима в любых других опасных для жизни человека ситуациях.
Файлы
Добавлен 10.12.2024
Добавлен 10.12.2024
Добавлен 10.12.2024
Добавлен 10.12.2024
Дополнительные файлы
{kind=link}
Добавлен 10.12.2024
{kind=link}
Добавлен 10.12.2024