П-регулятор
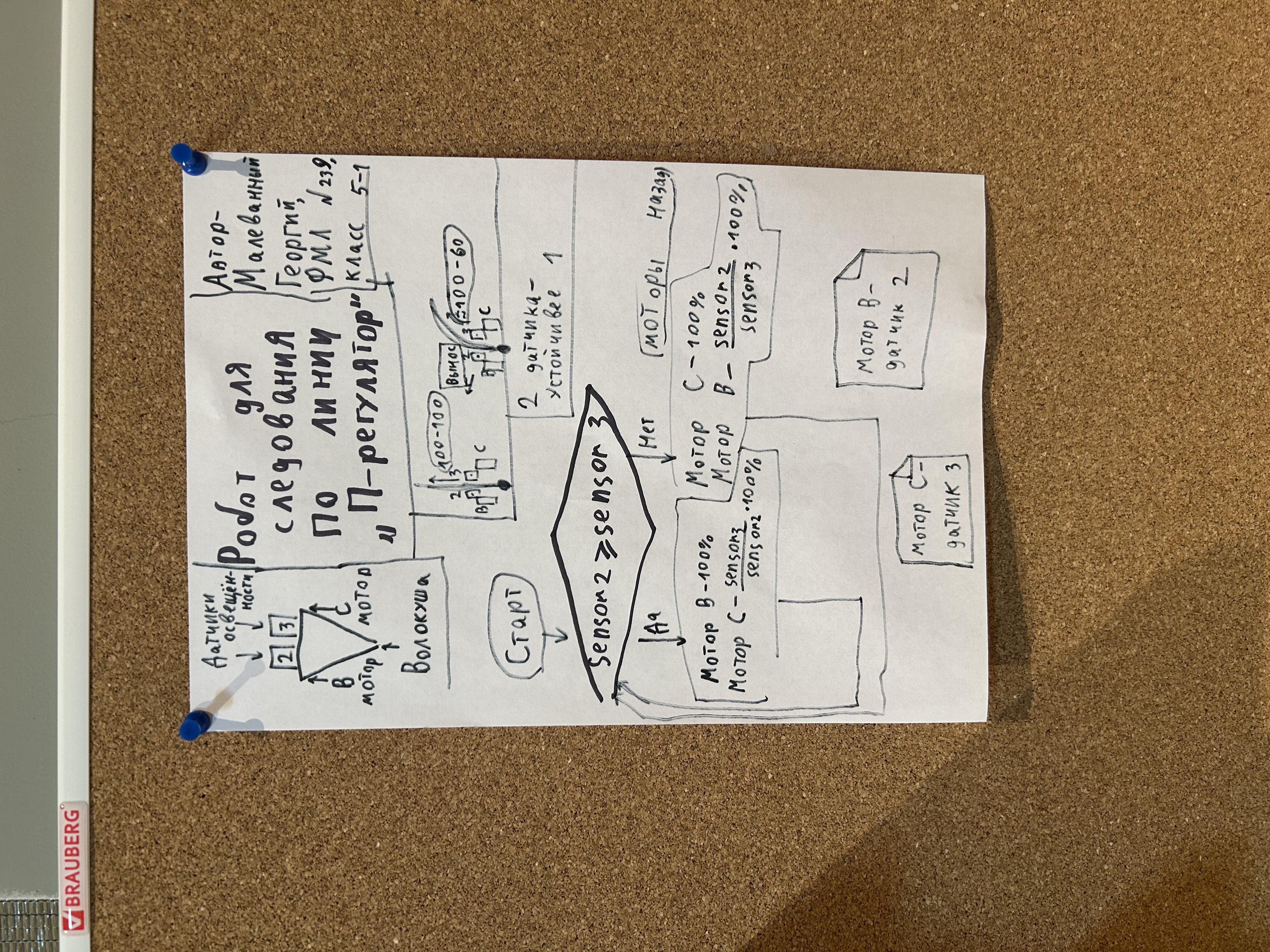
ROB-64025Я не хочу писать много. Это простой робот с 2 датчиками освещённости на LEGO EV3. Он едет на П-регуляторе, но улучшенном - он использует пропорции между значениями на датчиках освещённости. На моторе, соответствующему датчику освещённости(датчик 2 - мотор В, датчик 3 - мотор С)с максимальным значением среди этих двух, скорость - 100%. А на другом моторе - значение датчика, соответствующего ему, делённому на значение другого датчика и умноженному на 100%(вечная проблема процентов). Программа сделана в TRIK Studio на визуальном языке(передайте разработчикам TRIK Studio, чтобы сделали C++ для EV3). Блоков всего 7(!), из которых 2 - несущественные для кода и ещё 1 - блок условия, но очень важный. Другие 4 блока - «Моторы вперёд» с отрицательной скоростью(из-за мультипликатора 5:3(колёса:мотор)).
Спасибо создателям Lego EV3, TRIK Studio и этого соревнования, а также Сергею Александровичу Филиппову за 2 учебника робототехники и за то, что он научил меня основам следования по линии(для 1 датчика, для 2 я часть взял из учебника, а часть придумал сам).
Я приложил файл с черновиком. В нём 2 ошибки. С этим ничего не поделать - он сделан до сборки робота и там только идея.
Я прикрепил постер - фото листа бумаги.
Файлы
{kind=link}
Добавлен 10.12.2024
Дополнительные файлы
{kind=link}
Добавлен 10.12.2024