Karl_Marx16
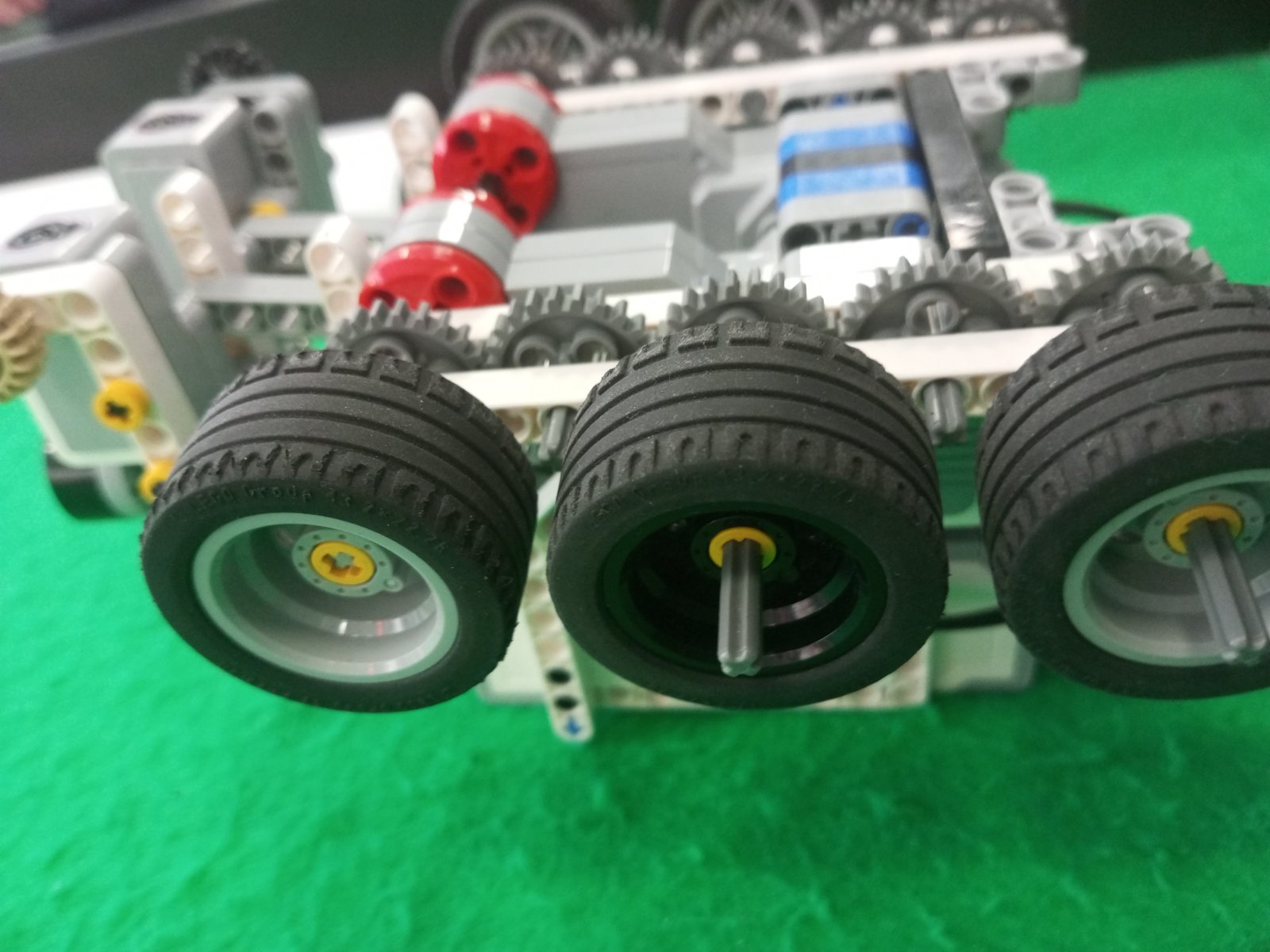
ROB-72028У моего робота шесть колес которые двигаются за счёт десяти шестерёнок которые движется за счет двух моторов с противоположной стороны от датчика ультразвука моторы скрепляются пятнадцати-дырочной балкой так-же моторы скрепляются технической балкой с открытым центром пять на семь мили-метров к моторам особым образом крепятся технические балки толщиной один на одиннадцать с половиной мили-метров с двойным изгибом а именно с помощью тройного крепления двойного крепления и двойного крестообразного крепления к балкам крепятся контроллер от него отходят шесть проводов два в моторы в левый и правый и один в датчик ультразвука и три в датчика цвета
Дополнительные файлы
{kind=link}
Добавлен 10.12.2024
{kind=link}
Добавлен 10.12.2024
{kind=link}
Добавлен 10.12.2024
{kind=link}
Добавлен 10.12.2024
{kind=link}
Добавлен 10.12.2024
{kind=link}
Добавлен 10.12.2024
{kind=link}
Добавлен 10.12.2024
{kind=link}
Добавлен 10.12.2024
{kind=link}
Добавлен 10.12.2024
{kind=link}
Добавлен 10.12.2024
{kind=link}
Добавлен 10.12.2024
{kind=link}
Добавлен 10.12.2024
{kind=link}
Добавлен 10.12.2024