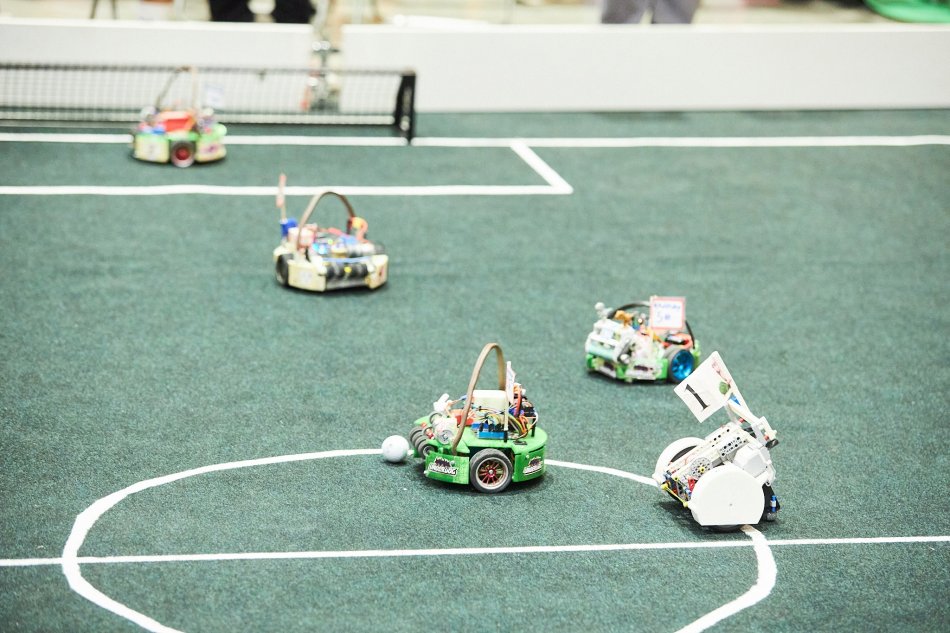
1 . Футбол управляемых роботов 4х4
Участникам футбола управляемых роботов 4×4 предстоит проявить себя не только в конструировании роботов, но и продемонстрировать сплоченную командную работу.
На поле соревнуются 8 роботов, каждым из которых управляет участник.
Полигон представляет собой уменьшенную копию настоящего футбольного поля. Задача каждой команды – забить наибольшее количество голов в ворота соперника.

2 . Интеллектуальное сумо 15х15: образовательные конструкторы
Интеллектуальное сумо — соревнование для самых стойких. Ваша задача: создать робота, который сможет вытолкнуть за пределы поля робота-соперника.
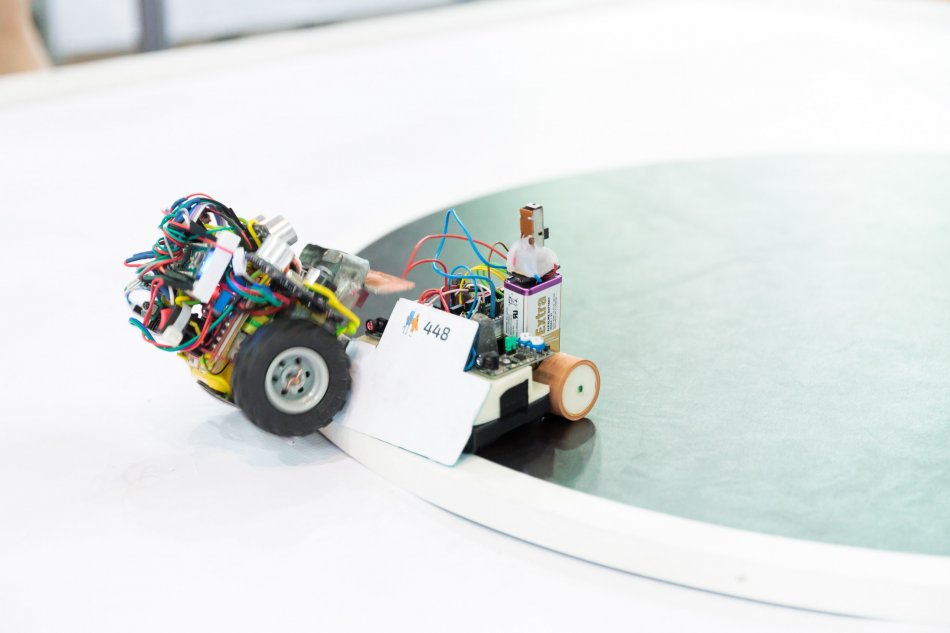
3 . Мини-сумо 10х10
Мини-сумо — соревнование для самых стойких. Ваша задача: создать робота, который сможет вытолкнуть за пределы поля робота-соперника.
К участию допускаются роботы любой конструкции, размером не более 10х10 см.
4 . Микро-сумо 5х5
Микро-сумо — соревнование для самых стойких. Ваша задача: создать робота, который сможет вытолкнуть за пределы поля робота-соперника.
К участию допускаются роботы любой конструкции, размером не более 5х5 см.

5 . Арканоид
В 1986 году была придумана игра «Арканоид». С тех пор в неё играют не только люди, но и роботы. Участникам состязаний предстоит сконструировать робота, который с помощью видеозрения сможет отбивать удары противника, перемещаясь по рейке. Победителем становится тот, кто забьет больше мячей в ворота соперника.

6 . Аквароботы
В соревнованиях аквароботов участникам предстоит сконструировать и запрограммировать такого робота, который сможет удерживаться на плаву и выполнять задания в автономном режиме. Роботу предстоит двигаться вдоль бортов бассейна, а также определять и обходить буи. 4 упражнения позволят определить самого быстрого, ловкого и умного водоплавающего робота.
7 . Миослалом
В этом состязании участникам необходимо подготовить управляемого мобильного робота, способного проехать от зоны старта до зоны финиша по определенной траектории, не задев объекты, расставленные на пути. Также необходимо подготовить пульт управления для робота. Для управления можно использовать только датчики ЭМГ (электромиограммы).